![]()
Figura 1: Diagrama de un agente y de su ambiente
En IA se necesita representar entidades que sea inteligentes. El referente de la inteligencia es el ser humano. Cabe preguntarse ¿qué caracteriza las acciones inteligentes de los seres humanos?
Los seres humanos cuentan con diferentes formas de actuar, pero de manera general actúan a través de órganos (brazos, piernas, etc.) que les permiten interactuar con un ambiente (el entorno en el que vive, o de forma más general el mundo en el que habita); estas acciones se dicen inteligentes cuando responden a un razonamiento que el agente realiza a partir de conocimiento previamente adquirido. Este conocimiento se da por su interacción con el mundo, por medio de sensaciones, las cuales son concebidas por el ser humano por medio de sus órganos sensores.
Esta narrativa simplifica las acciones inteligentes de los seres humanos. Lo que nos interesa es mapear esta abstracción a un sistema computacional. Por tanto, podemos tomar los siguientes elementos con los que esperamos que un sistema computacional “inteligente” cuente:
Sensores:
Los sensores son los componentes de entrada de un agente, aquellos elementos del agente que le permiten reconocer su ambiente.
Actuadores:
Los actuadores son los componentes de salida de un agente, aquellos elementos que le permiten interactuar con su ambiente.
Percepción:
Es la entrada que recibe un agente, aquello que es captado por los sensores del agente.
Ambiente:
El ambiente se compone de los elementos o condiciones en que el agente se desenvuelve y con los cuales puede interactuar a través de sus actuadores.
La Figura 1 muestra la estructura de un agente en forma gráfica.
Con lo anterior en mente, podemos pasar a definir lo que entendemos por un agente:
Definición 1 (Agente). Un agente es cualquier entidad que percibe su ambiente a través de sensores, y que actúa en el ambiente a través de actuadores.
El agente tendrá un conocimiento previo que se manifiesta en el siguiente concepto:
Definición 2 (Secuencia de percepciones). Una secuencia de percepción es la historia completa de lo que el agente ha percibido hasta el momento actual. Sea pi la representación de la percepción i, la secuencia de percepciones es entonces la secuencia p1,p2,...,pt; es decir, las representaciones de las percepciones hasta el momento t.
El objetivo de un agente será llevar a cabo una acción que sea considerada inteligente. Por acción entendemos:
Definición 3 (Acción). La acción de un agente es la interacción de éste, a partir de los actuadores con el ambiente, y depende del conocimiento construido a partir de la secuencia de percepciones.
Para manifestar la acción, debemos definir una función que “traduzca” el conocimiento previo en la acción misma, la interacción con el ambiente. Esta función se conoce como función del agente:
Definición 4 (Función del agente). La función del agente es aquella función que toma como entrada la secuencia de percepciones y emite como salida una acción:

Tal que pi, i = 1,...,t, son percepciones, y a es una acción.
La función del agente se implementa por medio de un programa (computacional) que se conoce como el programa del agente:
Definición 5 (Programa del agente). El programa del agente es una caracterización interna de la función del agente. Se trata de un programa que ejecuta la función del agente.
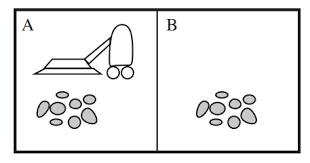
Ejemplo 1. Un ejemplo clásico para la construcción de un agente es el mundo de la aspiradora. Se cuenta con un agente aspiradora que actúa sobre un ambiente dividido en cuartos; en el caso más simple se cuenta con dos cuartos. Los elementos de este mundo son entonces:
Sensores: El agente puede percibir si hay suciedad o no en el cuarto en que se encuentra.
Actuadores: El agente cuenta con la opción de limpiar, una aspiradora, o bien moverse, a partir de elementos mecánicos.
Percepción: El agente puede percibir si hay suciedad o no. Estas percepciones se simbolizan con 1 (sucio) y 0 (limpio). Se puede tener una secuencia de percepciones en {0,1}*.
Ambiente: El ambiente está conformado de cuartos. Los cuartos se describen como cuadrados generalmente numerados con letras, A, B, etc.
La Figura 2 muestra un ejemplo de mundo de la aspiradora con sólo dos cuartos A y B. En este caso, la aspiradora está en el cuadro A, y ambos cuartos están sucios.
En este mundo de la aspiradora con dos cuadros, podemos definir un programa en base al siguiente algoritmo.
Este algoritmo revisa las percepciones que consisten en la localización del agente (location) y si el ambiente está o no sucio (dirt). Si la percepción implica que el cuarto está sucio, entonces se ejecutará la acción de limpiar. Por su parte si el agente se encuentra se encuentra en el cuadro A, ejecutará la acción ‘Derecha’ para moverse hacia el cuarto B; si está en el cuarto B, la acción que ejecutará será izquierda para moverse a A.
Si bien en este ejemplo podemos garantizar que el agente limpiará todos los cuartos, podemos ver que conforme el número de cuartos aumente y la disposición de estos se haga más intrincada, definir un algoritmo de este tipo será más complejo. En este ejemplo, tenemos 4 situaciones: 1) el agente está en A y A está sucio; 2) el agente está en B y B está sucio; 3) el agente está en A y A está limpio; y 4) el agente está en B y B está limpio. Podemos escribir estos estados como [(A,dA),(B,dB)LA], donde LA es la locación del agente y l ∈{0,1} nos dice si el cuadro está o no limpio.
Si el número de cuadros aumenta, por ejemplo con 4 cuadros, tendremos
![[(A,dA),(B,dB),(C,dC),(D,dD)LA ]](02-Agentes1x.png)
Como vemos, en este caso tenemos 24 = 16 posibles configuraciones del entorno, además de las 4 posibles posiciones en que el agente puede estar localizado; por lo que el total de estados que tendremos será 4⋅16 = 64 posibles estados. En general, para un mundo de aspiradora con n cuadros, tendremos n⋅2n estados. Cuando n es muy grande, definir un programa como el anterior se vuelve casi imposible.
Las acciones realizadas por agentes, por ejemplo los seres humanos, no siempre llevan a resultados satisfactorios. Dentro del espectro de las acciones humanas podemos considerar acciones impulsivas, que respondan a costumbres o sentimientos, sesgadas, etc.
Cuando nos enfocamos en generar sistemas computacionales inteligentes, este tipo de decisiones deben ser evitadas. No buscamos que un sistema de inteligencia artificial tenga sesgos.
De forma general, buscamos que estos sistemas nos lleven a solucionar problemas específicos (modelo estándar) de la forma más eficiente posible, buscamos que las decisiones que el agente tome sean óptimas y que los sesgos se reduzcan lo más posible.
Para buscar que los agentes dentro de los sistemas computacionales de IA sean lo más efectivos posibles, nos enfocamos únicamente en un tipo particular de agentes, los agentes racionales:
Definición 6 (Agente racional). Un agente racional es un agente que realiza las acciones óptimas con base en la información que tiene disponible.
Para entender lo que se quiere decir por ‘óptimo’ se suele recurrir a la teoría consecuencialista, la cual señala que el comportamiento de un agente se puede evaluar a partir de las consecuencias que tienen sus acciones. Para medir el impacto de las consecuencias de un agente se tiene una regla general:
Es mejor medir la utilidad de acuerdo con lo que se quiere para el entorno, más que de acuerdo con cómo se cree que el agente debe comportarse.
Sin embargo, este tipo de reglas dependen tanto del entorno como de un sujeto que evalúe aquello que se quiere para el entorno. En busca de formalizar más la medición de estas consecuencias introducimos el concepto de medida de rendimiento, la cual evalúa (de acuerdo a un criterio dado) una secuencia de estados del ambiente que es resultado de una secuencia de acciones del agente.
La medida de rendimiento toma en cuenta la regla del consecuensialismo, y como se apunta aquí debe prevalecer un criterio. Por lo general, buscaremos que este criterio responda al problema de alineación de valores; es decir, que responda a intereses de las personas que crean al sistema de IA.
Ejemplo 2. Consideremos como ejemplo el mundo de la aspiradora. En este entorno podemos tomar diferentes medidas de rendimiento:
El número de cuadros que ha limpiado el agente en un tiempo dado.
El qué tan limpio resulta el entorno después de que el agente ha ejecutado sus acciones.
Una combinación de los anteriores; es decir, el que tan limpio resulta el ambiente después de la ejecución de las acciones del agente y el que tanto tiempo le toma al agente maximizar la limpieza del ambiente.
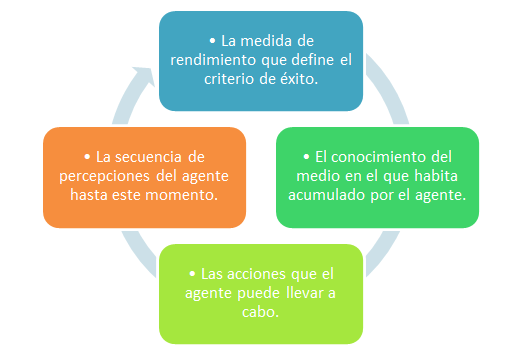
En particular la racionalidad dependerá de cuatro elementos:
La medida de rendimiento que define el criterio de éxito del agente.
El conocimiento previo que el agente tiene del entorno.
Las acciones que el agente puede realizar.
La secuencia de percepciones del agente has el momento actual.
La Figura 3 ilustra la interaccción de estos cuatro elementos en los agentes racionales.
Para formalizar un agente racional, necesitamos entender qué es una meida de rendimiento en términos matemáticos:
Definición 7 (Medida de rendimiento). La medida de rendimiento es una función R : S×A×S → ℝ que toma una una acción de un estado hacia un estado resultante y le asigna un valor de rendimiento, que determina qué tan bien aceptamos dicha acción con su resultado.
Esta función de rendimiento dependerá de diferentes factores:
El problema que buscamos resolver.
Qué consideramos como criterio de éxito para el agente.
Que el éxito del agente se corresponda a los valores de quienes programan a éste.
Se debe hacer una distinción entre el rendimiento absoluto y el rendimiento esperado. Por rendimiento absoluto entendemos el rendimiento real en un problema; es decir, lo que haría el agente es maximizar el rendimiento conociendo con exactitud cuál es el rendimiento en cada estado-acción del problema. Por lo que se buscaría:
Sin embargo, en la mayoría de los problemas no se conoce con exactitud el rendimiento de cada acción, pues puede haber factores que impidan este conocimiento, como la incertidumbre, la dinamicidad de los ambientes, etc.
Por tanto, un agente racional buscará maximizar el rendimiento esperado, es decir, el valor esperado del rendimiento:
![ˊ ′
argmaa∈AxE~p(s′|s,a)[R(s,a,s)]](02-Agentes3x.png)
Finalmente, esto nos permite definir de manera más precisa el concepto de agente racional.
Definición 8 (Agente racional). Un agente racional es un agente que selecciona, dada una secuencia de percepciones y su conocimiento previo, la acción que maximice la medida de rendimiento.
Ante la perspectiva de los agentes racionales, surgen las siguientes preguntas:
¿Qué tipo de problemas se consideran bajo el modelo estándar de la IA? Esto lo responde el concepto de ambiente o entorno, pues los problemas se conceptualizan dentro de los entornos en los que los agentes interactúan.
¿Qué tipo de agentes se pueden diseñar según el tipo de problema (entorno) se tenga? Esto tiene que ver con los tipos de agentes.
Para el diseño de un agente de Inteligencia Artificial es esencial el entendimiento del entorno de trabajo:
Definición 9 (Entorno de trabajo). El entorno de trabajo se específica por medio de cuatro elementos conocidos como REAS (o PEAS en inglés) que son:
Medida de rendimiento
Entorno
Actuadores
Sensores
Ejemplo 3. En el mundo de la aspiradora, podemos pensar que tenemos el siguiente entorno de trabajo (Tabla 1):
Para poder diseñar el agente en base al RAES es importante entender la naturaleza de los entornos, pues estos definen los problemas que queremos resolver, los objetivos y la medida de rendimiento.
Los entornos se dividen según diferentes aspectos que los constituyen:
Observabilidad. Según qué tanta información se puede obtener del ambiente tenemos:
Entorno totalmente observable: El entorno de trabajo es completamente observable si los sensores del agente tienen acceso a la información total de un estado del ambiente en un tiempo dado.
Entorno parcialmente observable: El entorno de trabajo es parcialmente observable si se tiene información parcial del ambiente.
Entorno efectivamente totalmente observable: Un entorno es efectivamente totalmente observable si el agente detecta los aspectos relevantes para realizar una acción.
Entorno no observable: Si el agente no tiene sensores, el entorno es no observable.
Número de agentes. Según el número de agentes que interactúan en el entorno, tenemos:
Entorno de agente individual: Un agente individual implica que hay un sólo agente que interactúa con el ambiente.
Entorno multiagente: Hablamos de multiagentes cuando se tienen dos o más agentes que se afectan entre sí. En este caso, se pueden considerar dos subtipos:
Entorno competitivo: Maximizar el rendimiento de un agente implica minimizar el rendimiento de otro(s) agente(s). Por ejemplo, ajedrez.
Entorno coperativo: Las acciones de cada agente se orientan a maximizar el rendimiento de todos los agentes. Por ejemplo, autos sin conductor.
Determinismo. Según si el entorno tiene un comportamiento o no predecible tenemos:
Entorno determinista: Un entorno es determinista si el estado de éste está determinado completamente por las acciones del agente y el estado previo.
Entorno estocástico: Es un entorno no-determinista donde los estados siguientes pueden tener varias salidas o bien donde existen aspectos no observables.
Entorno estratégico: Si el entorno es determinista, excepto por las acciones de otros agentes, decimos que es estratégico.
Secuencialidad. Según la forma en que se den las secuencias de situaciones del entorno se divide en:
Entorno episódico: En un entorno episódico consiste, la experiencia del agente se divide en episodios, en cada uno de los cuales el agente recibe una percepción y ejecuta una acción en base en ésta.
Entorno secuencial: En un entorno secuencial, la decisión actual puede afectar a las futuras decisiones del agente.
Dinamicidad. Según cómo se dan los cambios en el entorno se tienen los siguientes casos:
Entorno estático: Se dice que un entorno es estático si éste no cambia cuando el agente delibera.
Entorno dinámico: Se dice que un entorno es dinámico si éste puede cambiar mientras el agente delibera.
Continuidad. Según la estructura del entorno se da:
Entorno discreto: Se dice que un entorno es discreto cuando sus estados, las percepciones y las acciones son discretas.
Entorno continuo: Cuando el entorno se configura de tal forma que sus estados se dan de manera continua.
Información. Según la información que se tenga del entorno, tenemos:
Entorno conocido: Diremos que un entorno es conocido si los resultados de las acciones de los agentes se conocen de antemano.
Entorno desconocido: Un entorno es desconocido cuando no se conocen los resultados de las acciones de los agentes.
Ejemplo 4. El mundo de la aspiradora cuenta con un entorno que se define por las siguientes características:
Entorno completamente observable: en todo momento el agente tiene información de lo que sucede en el mundo.
Entorno de agente individual: el único agente que interactúa en el mundo es la aspiradora.
Entorno determinista: el estado del mundo está completamente determinado por las acciones de la aspiradora y el estado previo.
Entorno episódico: las acciones se dividen en episodios, y no hay afectación en los estados futuros por decisiones pasadas.
Entorno estático: el mundo sólo cambia cuando el agente realiza una acción.
Entorno discreto: como lo hemos planteado, el mundo se divide en cuadros que tienen un entorno discreto. Aunque si plantearnos un agente aspiradora que actuara en el mundo real, podríamos pensar que el entorno es continuo.
Entorno conocido: los resultados a cada acción del agente son conocidas de antemano, sabemos que si se aspira un cuadro este se limpiará, así como los estados resultantes de los desplazamientos del agente.
Ya hemos hablado del programa del agente, que es la implementación de la función del agente, la cuya mapea una secuencia de percepciones hacia una acción o un conjunto de acciones. El programa del agente es parte de la estructura de éste, pero también debemos contar con una arquitectura:
Definición 10 (Arquitectura del agente). La arquitectura del agente es el o los elementos físicos que conforman a éste, y el cual cuenta con sensores y actuadores. La arquitectura del agente se encargará de ejecutar el programa del agente.
De esta forma, entenderemos a un agente como la suma de su programa y de su arquitectura; esto es:
| (1) |
De esta forma, las decisiones del agente se basarán en una secuencia de pasos: primero, los sensores, que forman parte de la arquitectura, recibirán las percepciones del ambiente; posteriormente, las percepciones se transmitirán al programa para que este seleccione las acciones; finalmente, las acciones se ejecutará por medio de los actuadores. En resumen, se tiene la secuencia:

A partir del programa del agente podemos hacer una clasificación en varios tipos de agentes según la forma en que se deciden las acciones de acuerdo a las percepciones.
Definición 11 (Agente dirigido mediante tabla). Un agente dirigido mediante tabla se trata de un agente el cual cuenta con una tabla que contiene la asociación de una secuencia de percepciones con una acción. De esta forma, el agente dirigido mediante tabla, al recibir una percepción, revisa la tabla y regresa la acción correspondiente en ésta.
En este sentido, el agente dirigido mediante tabla es un agente cuya información de las acciones le es dada por el programador mediante una tabla que le diga cómo actuar en cada caso. Esto requiere que el programador conozca las acciones esperadas ante cada secuencia de percepciones. Este tipo de tablas son del siguiente tipo:
| Cadena de percepciones | Acción |
| p1 | a1 |
| p2 | a2 |
 |  |
| p1,p2 | at+1 |
| p1,....,pt | aT |
En este caso, cada pi, i = 1,2,...,t es una percepción. Como se ve, se consideran secuencias de percpeciones, pues esto mejora la acción a elegir. Un esbozo del código de un agente dirigido mediante tabla es el siguiente:
Ejemplo 5. Consideremos de nuevo el mundo de la aspiradora con dos cuadros. En este caso, podemos plantear una tabla simple que sea de la forma:
| Percepción | Acción |
| (A, limpio) | Moverse a la derecha |
| (A, sucio) | Limpiar |
| (B, limpio) | Moverse a la izquierda |
| (B, sucio) | Limpiar |
| (A, sucio), (B, limpio) | Moverse a la izquierda |
| (B, sucio), (A, limpio) | Moverse a la derecha |
| (A, sucio), (B, sucio) | Limpiar |
| (B, sucio), (A, sucio) | Limpiar |
En este caso, si el agente se encuentra en A y este está limpio se moverá al cuadro B, e inversamente si está en B y este cuadro está limpio, se moverá hacia A. Pero si el cuadro en el que se encuentra esta sucio entonces ejecutará la acción de limpiar.
El problema de un agente dirigido mediante tabla es el número de búsquedas que debe
hacer en la tabla; estas son: ∑t=1T | |t ( conjunto de posibles percepciones, T tiempo de
vida del agente). Por ejemplo, en el ajedrez, tenemos que ∑t=1T ||t = 10150.
|t ( conjunto de posibles percepciones, T tiempo de
vida del agente). Por ejemplo, en el ajedrez, tenemos que ∑t=1T ||t = 10150.
Definición 12 (Agente reactivo simple). Un agente reactivo simple es un agente que decide las acciones a partir únicamente de la percepción actual, ignorando la historia de percepciones.
Un agente reactivo simple se basa, entonces, en condiciones de tipo “Si... entonces...” o en forma lógica X → Y . Estas condiciones se manifiestan en el programa por medio de reglas ‘if... then... else...’. Estas reglas requieren de un conocimiento previo del programador, quien debe conocer las respuestas a las acciones del agente, para poder manifestarla en este tipo de reglas. De tal forma, que se requiere de un entorno conocido y, preferentemente, completamente observable, así como estático (pues un cambio en el entorno mientras el agente no puede ser expresado en este tipo de reglas) y por tanto determinista. Es decir, este tipo de agentes funciona para entornos simples.
Una estructura simple para el programa del agente se muestra a continuación:
Los agentes reactivos simples no son útiles más que cuando la acción depende únicamente de la percepción actual, lo que no es común en muchos problemas complejos de IA.
Ejemplo 6. En el mundo de la aspiradora con dos cuadros podemos dar un conjunto de reglas condición-acción para generar el agente reactivo simple:
Extender este agente al caso de más cuadros es también muy sencillo. Sin embargo, cuando se cuenta con muchos cuadros el conjunto de reglas de condición-acción se puede volver tedioso.
Definición 13 (Agente basado en objetivos). Una agente basado en objetivo es aquel que cuenta con información de un objetivo que describe la situación que se desea alcanzar con sus acciones.
Los agentes basados en objetivos se enfocan, entonces, en alcanzar una meta previamente definida de la manera más efectiva. Por ejemplo, un agente basado en objetivos puede ser un agente que trace una ruta en un mapa para llegar del punto A al punto B; la meta será el punto B y el agente buscará las acciones más afectivas que lo pueden llevar hasta allí.
Los agentes basados en objetivos refieren a la parte de planeación y búsqueda. Estos serán revisado con mayor profundidad en los temas de agentes de búsqueda.
Para salvar las restricciones del agente reactivo simple, se propone un estado interno del agente que refleje la historia y los aspectos no observados del estado actual. En particular se busca modelar el ambiente por medio de dos modelos complementarios; el primero de ellos es el modelo de transición:
Definición 14 (Modelo de transición). Un modelo de transición refleja el cómo los estados del ambiente cambian, por lo que busca modelar dos factores:
el cómo el mundo (ambiente) cambia conforme el paso del tiempo;
cómo cambia el mundo dependiendo de las acciones del agente.
El segundo modelo es el modelo sensor:
Definición 15. Modelo de sensor Un modelo de sensor modela el cómo el mundo se refleja en las percepciones del agente.
En este sentido, el modelo de transición le dice al agente cómo cambia el mundo, ya sea de forma dinámica o por medio de las acciones; refleja las transiciones entre los estados del modelo. Por su parte, el modelo sensor es un modelo de las percepciones del agente. Combinando estos dos modelos para definir un estado interno del agente tenemos el agente reactivo basado en modelos.
Definición 16 (Agente reactivo basado en modelos). Un agente reactivo basado en modelos es un agente que se basa en un modelo del mundo determinado por:
un modelo de transición; y
un modelo de sensor.
Esta información se guarda en un estado interno, que se modifica por los modelos y la información de la percepción actual.
El modelo basado en modelos cuenta entonces con información previa relevante sobre el mundo en el que interactúa. Esta información puede irse modificando a través del tiempo según las percepciones del agente y los estados del mundo. Por tanto, este tipo de agentes puede interactuar con entornos dinámicos y estocásticos.
Un esquema de programa para este tipo de agentes se meustra a continuación:
Un tipo de agente basado en modelos se puede representar por medio de un modelo gráfico probabilístico; estos se revisarán con más detalle en la parte de modelos probabilísticos.
Ciertas características del entorno como la observabilidad parcial y/o el no determinismo implican decisiones que deben hacerse con incertidumbre. Para esto, se adopta el principio de utilitarismo:
Definición 17 (Principio de utilitarismo). La utilidad indica cuáles acciones son preferibles al comparar los resultados que éstas tienen en el mundo.
Para cuantificar este principio se utiliza una función de utilidad:
Definición 18 (Función de utilidad). Una función de utilidad es una medida de rendimiento que indica la utilidad de las acciones del agente.
De esta forma, podemos definir un agente basado en utilidad de la siguiente forma:
Definición 19 (Agente basado en utilidad). Un agente basado en utilidad es aquel que, dada una función de utilidad, busca maximizar el valor esperado de esta función.
Este tipo de agente pueden también pensarse dentro de agentes de aprendizaje (como Q-Learning), así como parte de los modelos probabilísticos, de los que hablaremos más adelante.
En problemas complejos, como en entornos parcialmente observables, dinámicos, estocásticos, etc., los agentes deben adaptarse al entorno por medio de la exploración y de esta forma aprender. Entenderemos por aprender:
Definición 20. Se aprende cuando un agente que opera sobre un entorno desconocido mejora su rendimiento a partir de observar resultados previos de sus acciones y evaluarlos.
El aprendizaje se puede basar en una recompensa o penalización que generan una respuesta en el comportamiento del agente. Cualquier tipo de agente (reactivo simple, basado en modelos, basado en objetivos o basado en utilidad) puede incorporar el aprendizaje.
Definición 21. Un agente que aprende es un agente que mejora su rendimiento a partir de observar resultados previos. Este agente cuenta con:
Elemento de aprendizaje: Determina cómo actuar en base a la crítica.
Elemento de actuación: Decide la acción (agente).
Crítica: Señala que tan bien está actuando en base al nivel de actuación.
Generador de problemas: Sugiere acciones exploratorias, que permitan mejorar el rendimiento.
Considérese de nuevo el mundo de la aspiradora, en donde se cuenta con un agente racional, la aspiradora, cuyo objetivo es limpiar su entorno. Su medida de rendimiento se basará en qué tan limpio deja el entorno en el menor tiempo posible. Por tanto podemos decir que la medida de rendimiento adopta los siguientes valores:
+1 si el agente limpia un cuarto sucio o se mueve a un cuarto sucio.
-1 si el agente limpia un cuarto limpio o se mueve a un cuarto limpio.
De esta forma, maximizar el rendimiento equivale a limpiar todos los cuartos de la forma más rápida posible. Por ejemplo, consideremos el mundo de la aspiradora con cuatro cuartos:
| A | B |
| C | D |
Un agente reactivo simple podría tomar las siguientes instrucciones:
if s = sucio then {
limpia
}
else{
if s.location = A {
mover a la derecha
}
if s.location = B {
mover abajo
}
if s.location = D{
mover a la izquierda
}
if s.location = C{
mover arriba
}
}
Estas instrucciones garantizan que el agente siempre termine de limpiar todo el entorno; sin embargo, la limpieza no siempre se hará en el menor tiempo posible. Por ejemplo, si sólo los cuartos A y C están sucios, la mejor estrategia es, iniciando en A, limpiar este cuarto y moverse hacia abajo para limpiar C; pero en este caso, el agente siempre revisará todos los cuadros empezando por A.
Este agente carece de una exploración y una planeación, pues si bien puede solucionar el problema, no lo hace de la manera más efectiva. Ahora bien, si en lugar de tener 4 cuartos, se cuenta con un mayor número, por ejemplo 64, o 81 o o incluso más, la carencia de una planeación se hará más patente.
Para esto, se buscan diferentes estrategias que permitan, además de solucionar el problema, hacerlo de la manera más eficiente. Para poder aplicar estas estrategias se necesita de una formalización del problema; es decir, describir el problema en términos matemáticos precisos.
Para caracterizar nuestro problema debemos tomar en cuenta las siguientes consideraciones:
En cada momento de tiempo el estado puede estar bajo una configuración particular, a esta le llamamos estado. Generalmente comenzaremos de un estado particular, o estado inicial.
Según la configuración, el agente puede interactuar con el mundo a partir de una acción específica.
Las acciones tienen consecuencias en los estados del mundo, cambiando estos estados en nuevos estados, a esto lo llamamos transición.
Como de lo que se trata es de minimizar una función de rendimiento, diremos que cada acción tiene un costo.
Ejemplo 7. Podemos pensar en el mundo de la aspiradora, comenzando con el entorno con dos cuadros; en este caso tendremos lo siguiente:
Por estado entenderemos una configuración del ambiente, esto implica dos cosas: 1) la posición del agente; y 2) sabe qué cuadros están sucios y cuáles limpios. Por ejemplo, un estado es cuando el agente está en el cuarto A, y el cuarto A está limpio y el cuarto B sucio.
El estado inicial depende de cómo se encuentra el mundo, el estado, cuando el agente comienza a interactuar con el. Por ejemplo, si ambos cuartos están sucios y el agente comienza en el cuarto A, esta configuración será el estado inicial.
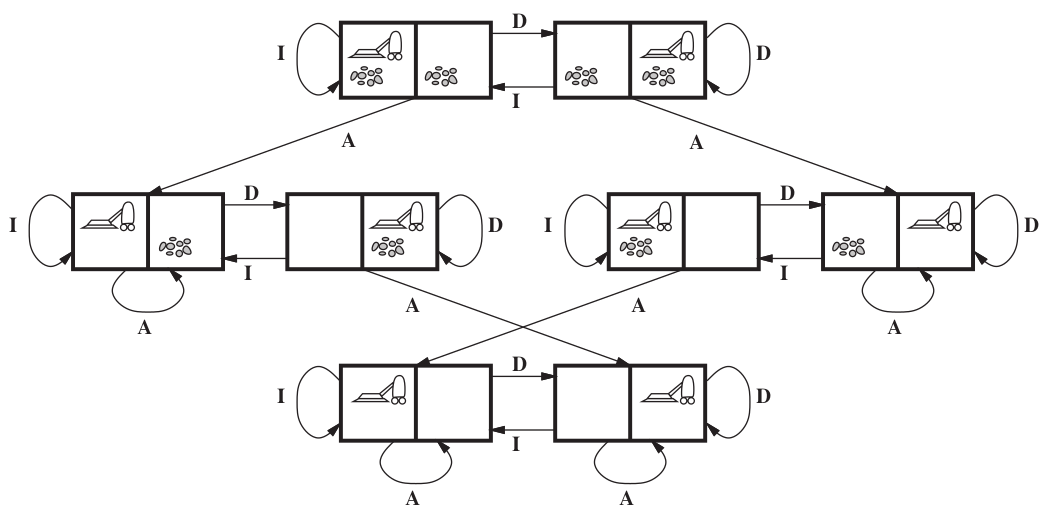
Las acciones están determinadas por las capacidades que tiene el agente de interactuar con el mundo. Hasta ahora hemos asumido que el agente puede moverse a la izquierda (I) o a la derecha (D), con más cuartos también podría desplazarse hacia arriba o hacia abajo, y además tiene la capacidad de aspirar (A).
Las transiciones se definen en la forma en que los estados se ven afectados por las acciones del agente. Por ejemplo, si pensamos que el estado inicia con ambos cuartos sucios y éste posicionado en el cuarto A, la acción de aspirar nos llevará a un nuevo estado donde el cuarto A ahora está limpio. Por su parte, la acción de moverse a la derecha nos llevará al estado donde el agente está posicionado en el cuarto B. Finalmente, si la acción que se ejecuta es moverse a la izquierda, no habrá un cambio en la configuración del entorno, por lo que diremos que permanecemos en el mismo estado. Un diagrama de las transiciones puede verse en la Figura 4.
Necesitamos uno o más estados meta; es decir, aquellas configuraciones del mundo en las que deseamos terminar; en este caso, un estado meta sería uno en que todos los cuartos se encuentren limpios, sin importar la posición del agente (por lo que tenemos dos estados finales).
El costo tiene que ver con el rendimiento que buscamos que tenga el agente al resolver el problema. En principio, podemos pensar que el cada acción tiene un costo de +1, de tal forma que el rendimiento estará basado en pagar un menor costo. Por ejemplo, si el agente realice muchas acciones que lo lleven a un mismo estado, el costo aumentará, si realiza sólo las acciones necesarias para completar la tarea, el costo será mínimo.
La función de rendimiento puede pensarse como el número de cuartos limpios menos el costo total. De esta forma, el rendimiento máximo se alcanzará cuando el agente haya limpiado todos los cuartos en el menor número de pasos posibles.
Lo que hemos trazado nos lleva a pensar en los conceptos de planeación, puesto que buscamos que el agente puede hacer una planeación que lo lleve a solucionar un problema de la mejor manera.
Definición 22 (Planeación). Una planeación es una secuencia de acciones que permitan al agente llegar a un objetivo dado.
De esta forma, definiremos a un agente de resolución de problemas como aquel agente que haga una planeación:
Definición 23 (Agente de resolución de problemas). Un agente para resolución de problemas es un agente basado en objetivos, el cual realiza una planeación para cumplir con los objetivos determinados.
Finalmente, debemos formalizar la forma en que definiremos el problema, pues esto nos dará las herramientas para encontrar soluciones satisfactorias. Ya hemos determinado los elementos con los que cuenta un problema, la formalizaicón, entonces, es la siguiente:
Definición 24 (Problema de búsqueda). Un problema de búsqueda se define como una 6-tupla SP = (S,A,s0,T,F,c) donde:
S = {s0,s1,...,sm} es un conjunto de estados del mundo, que reflejan cómo se encuentra el ambiente en cada momento.
s0 ∈ S es la configuración inicial del mundo, o estado inicial.
A = {a1,a2,...,an} son las acciones que puede realizar el agente.
T : S×A → T es la función de transición, que indica que se pasa de un estado a otro del mundo dado el efecto de una acción.
F ⊆ S el conjunto de metas o estados finales, a los que deseamos que el agente conduzca el entorno.
c : S×A×S → ℝ es una función de costo, que determina cuánto le cuesta ala agente pasar de un estado a otro con una acción dada.
La forma en que hemos definido el problema nos recuerda a un autómata pesado. Esto nos permite encontrar soluciones que se pueden implementar computacionalmente. Para encontrar las soluciones, recurrimos al concepto de camino:
Definición 25 (Camino). Un camino es una secuencia de acciones ai0ai1 aim ⊆ A, la
cual determina una forma de moverse en la gráfica.
aim ⊆ A, la
cual determina una forma de moverse en la gráfica.
De forma más concreta, si A son las acciones, un camino es un elemento de A* que es posible en el problema; es decir, de toda las cadenas de acciones que se pueden realizar dentro de las transiciones del problema.
Sin embargo, no todos los caminos nos servirán; buscamos aquellos caminos que nos lleven del estado inicial al final. Estas serán nuestras soluciones.
Definición 26 (Solución). Una solución es un camino ai0ai1 aim ⊆ A tal que parte de s0,
esto es T (s0,ai0) = si1, y que llega hasta un estado final, T (sim,aim) ∈ F .
aim ⊆ A tal que parte de s0,
esto es T (s0,ai0) = si1, y que llega hasta un estado final, T (sim,aim) ∈ F .
Si pensamos al problema como un autómata, las soluciones son las cadenas (de acciones) que son aceptadas por éste. Es decir, las soluciones conforman el lenguaje de este problema. Dentro del conjunto de soluciones, habrá soluciones con un costo menor, las cuales consideramos como las soluciones óptimas.
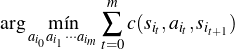
Definición 27 (Solución óptima). Una solución óptima es una solución que minimiza la función de costo sobre el camino; es decir, es una solución a la función objetivo:
| (2) |
Ejemplo 8. Retomamos el problema del mundo de la aspiradora con dos cuadros; en primer lugar, formalizamos el problema para poder encontrar las soluciones:
El conjunto de estados está determinado de la siguiente forma:
![S = {[(A,dA),(B,dB),Lag]:di ∈ {0,1},Lag ∈ {A,B}}](02-Agentes11x.png)
Por ejemplo, [(A,1),(B,1),A] indica un estado en donde ambos cuadros están sucios y el agente está en A. En total tenemos 16 estados posibles. El estado inicial puede ser [(A,1),(B,1),A].
Las acciones son A = {I,D,A} donde I indica izquierda, D derecha y A aspirar.
Las transiciones se definen por la función:
T  [(A,1),(B,dA),A],A [(A,1),(B,dA),A],A | = [(A,0),(B,dA),A] | ||
T  [(A,dA),(B,1),B],A [(A,dA),(B,1),B],A | = [(A,dA),(B,0),A] | ||
T  [(A,dA),(B,dB),A],D [(A,dA),(B,dB),A],D | = [(A,dA),(B,dB),B] | ||
T  [(A,dA),(B,dB),B],I [(A,dA),(B,dB),B],I | = [(A,dA),(B,dB),A] | ||
T  [(A,dA),(B,dB),A],I [(A,dA),(B,dB),A],I | = [(A,dA),(B,dB),A] | ||
T  [(A,dA),(B,dB),B],D [(A,dA),(B,dB),B],D | = [(A,dA),(B,dB),B] | ||
Donde dA,dB ∈{0,1} indica la limpieza de cada uno de los cuartos.
Los estados finales son [(A,0),(B,0),A] y [(A,0),(B,0),B]
La función de costo se define como c(s,a,s′) = 1 para todo par de estados s,s′∈ S y acciones a ∈ A.
La visualización del problema se encuentra en la Figura 4, de aquí, podemos ver que existen varios caminos. Las soluciones desde el estado [(A,1),(B,1),A] son varios; por ejemplo, IIDIAIAIADIDA es un camino que lleva a un estado solución [(A,0),(B,0),B]. Sin embargo, no es una solución óptima. Una solución óptima es ADA, y de hecho es la única solución óptima desde el estado inicial dado.